If this is your first visit, be sure to
check out the FAQ by clicking the
link above. You may have to register
before you can post: click the register link above to proceed. To start viewing messages,
select the forum that you want to visit from the selection below.
Yaro,
thanks for letting us know what the negative influences were in a working example. That is as valuable to me as what works.
Michael - thanks for the spot on comment! Success with any experimental device always depends on the yin-yang interplay of the results. Any astute and successful experimenter uses the failures and disappointments to advance the experiment to higher level of understanding.
I spent the last few days modifying the existing ZFM Proto to correct and improve most of the nagging details that limited performance. Most of the critical steel fasteners were replaced with 18-8 Stainless Steel bolts. Additional tweaks were made to the bearing alignment and reed switch position. The biggest impact came from replacing a small steel bolt directly under the timing rotor which was influencing the timing and firing arc duration at high RPM - big change!
The Iron core motor rotor was removed and replaced with the original Aluminum rotor - virtually identical dimensions and Neo's. This was done to establish additional baseline information for comparative purposes to the Iron core rotor.
The last tests in the previous post noted some unusual behavior in the timing arc and firing positions - these were subsequently attributed to the small steel bolt under the Timing Rotor and two SSG wheel magnets that were a bit too close to the Timing Rotor. Amazing how the SSG magnets influenced the the timing from 6" to 8" away.
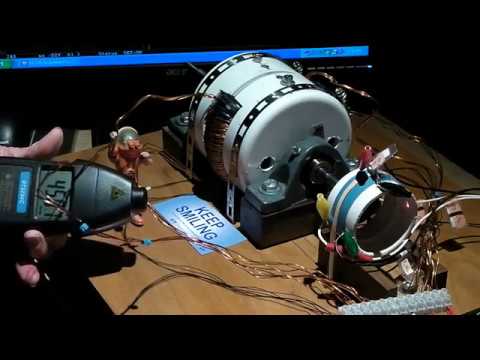
This unusual behavior was deemed well worth the effort to document and to create a short show and tell video to note the influence of a concentrated magnetic field. For this video the timing arc was set for a 45 to 50 degree firing duration and 36 volt operation - essentially trying to limit the maximum speed.
The influence of the C8 magnet pair on the coils was dependent on the polarity facing the coils:
The south facing pole surface would add some additional speed (~250 RPM) to the motor.
The north facing pole surface would lower the speed about the same amount.
Distance from coils ~1".
The influence of the C8 magnet pair was much more pronounced when facing the timing rotor outboard face, one could hear the speed increase from up to 10" away or more. The Timing Rotor Neo's had their south face away from the motor and the SSG magnets had their north face towards the timing wheel for the speed increase; with the SSG magnets' south facing the ZFM could be nearly stalled. Check out the below video.
Here is the operational data:
24v 3028 RPM 0.82A without magnets
24v 4936 RPM 1.20A with North facing magnets
36v 4590 RPM 0.93A without magnets
36v 6500+RPM 1.40A with North facing magnets
A simplistic explanation could be that the SSG magnets' position enhances the strength of the overall magnetic field that triggers the coil firing and expands the firing arc duration. It has been observed in prior tests that expanding the firing arc duration increases the motor speed along with the battery amp draw. The applied voltage is also a factor...
Still remains one strange motor...
All very interesting and, as usual, more to come,
Yaro
Over the course of this month sporadic testing has been accomplished on the ZFM Proto and while there is no video this time (thought that the readership had enough of the squiggly lines) there are interesting points from the latest testing from Jan 9 and later.
The following data is using the maximum firing arc of about 70-75 degrees:
12v 1800 RPM @1.0A
12v 1921 RPM @1.0A
12v 2370 RPM @0.9A
The RPM slowly increases over a few minutes.
24v 4026 RPM @1.30A
24v 4045 RPM @1.31A
24V 4470 RPM @1.30A
Same increase in RPM over time.
Advancing the timing a bit yielded the following for 36v:
36v 6070 RPM @1.48A
36v 6123 RPM @1.44A
36v 6378 RPM @1.43A
The motor at this point is rotating at a decent speed and the starting torque appears to be improving. The following test from Jan 18 starts getting into a different zone of performance as the timing is further advanced and the motor begins to display some unusual characteristics that may be related to frequency and harmonics.
Once the motor hit an RPM of ~7000 it accelerated up to 7900 RPM. The motor sounded differently from the previous tests and the torque was improved - in this instance, unfortunately, a video was not taken. Too many things to control and not enough hands available. You should note that the amperage draw from the battery is remaining relatively stable or diminishing as the RPM increases. The coils were relatively cool, but the resistors on the circuit board were hot.
It appeared that the firing point for the coils was advanced well into the coil area. The timing arrangement was closely examined after the test was completed and this indeed appeared to be the case. The following day I was not able to duplicate the above performance - everything was untouched and the same. Certainly a point of interest and bafflement by the awakening of the "Beast".
The setup has been sitting for a week now and I will try to duplicate the above behavior if possible. This is one strange motor!
The ZFM Proto project has been progressing with the initial testing of the Iron rotor over the past week or so. Sad to say the initial results of the Iron rotor's performance were inferior, to a certain degree, over the Aluminum rotor design. However, with judicious and careful tweaking the speed (RPM) was considerably improved. The self aligning pillow block bearings are difficult to align perfectly - this bearing method requires review and/or modification. Below is the image of the Iron rotor with the Neo's glued in place - note Loctite AA 332 adhesive was used for the installation of the Neo's. Should be good to about 15,00 RPM if properly applied and installed.
The test data for the Iron rotor is as follows for 65 to 70 degree firing arc duration:
12v - 1485 RPM @ 0.84 A
24v - 2990 RPM @ 1.23 A
36v - 4370 RPM @ 1.42 A
The motor will slowly accelerate by steps to the following:
36v - 4400 RPM @ 1.40 A
36v - 4595 RPM @ 1.33 A
36v - 4900 RPM @ 1.32 A
The above does indicate that there are certain peculiarities to its operation. The ZFM is very sensitive to the voltage input value.
If the firing arc duration is decreased to the recommended value of 45 - 50 degrees then the following are observed:
12v - 1150 RPM @ 0.63 A
24v - 2100 RPM @ 1.09 A
36v - 2990 RPM @ 1.18 A
The torque is low for this configuration also!
So here is the video of the Iron rotor in operation - please note that the initial RPM value of 3500 for 36 volt operation is incorrect and should be 4500 RPM - tongue tied...
This is about enough for this phase - more to come.
Alright I am going to talk about coils and give away Great Grand Poohbah secrets, eh maybe not, how the hll should I know. I am still at the point experimentally where there is a sliver of plausible deniability, so by all means don't take too seriously. This isn't my secret though I'll just repeat a point Joseph Neumann made beautifully, bring it up with him if you don't like it. So 100 feet of 30 gauge wire has a resistance of 10.3 ohms, lets say we use it to make a coil with 100 winds. Now if we used a length of 10 gauge wire such that it equalled 10.3 ohms resistance we would have over 10,000 feet of wire, let's say that only would make a 1000 wind coil. You now have the same input energy and ten times the winds, you see the problem? About the only way back to conventional heaven (or hell if you like) I can see is that the larger gauge wire coil will be physically larger and hence the B field more dispersed in space though its total MMF must it seems by definition be ten times greater, hence Big Eureka, I have at least seen video of Joseph Neumann running his Big Eureka machine.
Let's continue, so MMF is a function of Amp Turns n'est pas? at least primarily and if we neglect core material and coil shape. So let's take a coil of 100 turns at a voltage of 10 with resistance of 1. Now let's double the length of the coil, so now you have say 150 turns on your coil, V remains 10, as length doubled R now = 2. As resistance has doubled amp draw has halved, voltage remains constant so input power is one half. So lets say 1 amp over 100 turns = 100 AT to 0.5 Amps over 150 turns = 75 AT. We got 100 AT for 10 Watts and 75 AT for 5 Watts. Let's double the length of wire for the coil again and go to an alternate universe where doubling this length only led to a single wind being added to our coil. Resistance again doubled so we now have 0.25 amps over 151 turns = 37.75 AT now for 2.5 Watts, again an improvement. When adding winds leads to small incremental improvements the effects from the core and the shape of the coil become more significant, I suspect I know from Wheeler's formula the ideal core shape for maximal induction for a given wire length, that is beyond this discussion and I would also note I am not talking about the strength of the radiant which is a different animal only the strength of the B field.
So let's apply this to a motor, Well in general then more winds better and this finding would seem to increase with decreasing effect indefinitely. However with most motors as MMF increases Lenz effects increase adding yet another variable that might negate gains in efficiency. One would need to conceive of a Lenzless motor to be sure to see efficiency improvements from further winds. The ZFM may fit that bill, as I suspect would the Window Motor, however neither run on the B field, so does any of the above really apply?
Yes and using the secondary winding to drive the next set of coils so the time delay would give the rotor time to reach the next set of coils showed some real cleverness for a simple solution. In my opinion he was trying for a simple motor that could be run directly off line voltage with no switching, control circuits, or commutation. However add the magnets to the rotor, a bit of control circuit, and a little switching and you have the ZFM. He probably never saw it as his goal was to simplify and make more economical. Still it was very interesting for what it was intended to do. I wonder why it was never adopted main stream or further developed by him. Maybe the problem could have been developing enough usable horse-power.
By connecting up the main coils in circuit with a generator of alternating currents, the armature of the motor will be rotated. I have assumed that this action is explained by the following theory: A current-impulse on the line passing through the main coils establishes the magnetic poles of the annular field-magnets at points midway between said coils; but this impulse produces in the secondary coils a current differing in phase from the first, which, circulating through the second pair of energizing-coils, tends to establish the pole at points ninety degrees removed from their first position, with the result of producing a movement or shifting of the poles in obedience to the combined magnetizing effect of the two sets of coils. This shifting, continued by each successive current-impulse, establishes what may be termed a “rotary effort,” and operates to maintain the armature in rotation.
THINK about how much the ZFM is related to this patent
Didn't know that was Tesla, in any event I have got to look at what you are talking about as well as Laser Saber's V4 Joule Ringer. When I glanced at what does he call it SJR 4 it did remind me of an oscillator Forrest Mims showed where you charge a cap to a voltage that allows it to discharge through a transistor which turns on the power to charge the cap, etc. Seems similar except the cap gets charged by a radiant it seems. Must be a high Q oscillator if he is getting the sort of results he is talking about. If you have also applied this to a mechanical rotor that would be very, very cool, as I said I need to look at yours and his work. I have been discharging a set cap into all sorts of coils and measuring the radiant, cliff notes version, for a given mass the counter wound Tesla coil gives by far the best radiant, though I doubt it has great inductance.
Perhaps I should not have added THIS to the ZFM just yet. With a little fine tuning, I have been able to get the ZFM up to 1,130rpm no ringing involved still 4 volts still microwatts only one coil so far...
KR- Patrick
Yea, I liked it much better. Makes more sense considering Tesla invented the AND logic gate - Thanks! :-)
Not much of a schematic, pretty much exactly as I describe in vid.Here is where I posted it a while back though, I posted a vid in that thread you can also find it on my youtube.
Didn't know that was Tesla, in any event I have got to look at what you are talking about as well as Laser Saber's V4 Joule Ringer. When I glanced at what does he call it SJR 4 it did remind me of an oscillator Forrest Mims showed where you charge a cap to a voltage that allows it to discharge through a transistor which turns on the power to charge the cap, etc. Seems similar except the cap gets charged by a radiant it seems. Must be a high Q oscillator if he is getting the sort of results he is talking about. If you have also applied this to a mechanical rotor that would be very, very cool, as I said I need to look at yours and his work. I have been discharging a set cap into all sorts of coils and measuring the radiant, cliff notes version, for a given mass the counter wound Tesla coil gives by far the best radiant, though I doubt it has great inductance.
Alright I apologize to the group, not sure if I'll have an improvement over the Holidays. JB's work is pretty much always deeper than your first assessment. I acknowledge his genius and am making a tactical retreat for the moment. What I can say is I spun a rotor up to 2000 rpms and it flew apart (super glue, masking tape problem) so, after gathering myself, I rebuilt the same rotor with the same magnets facing radially instead of tangentialy. It didn't work quite as well (about 20-25% worse) and behaved differently, i.e. you needed a very large air gap (look at the conference machine, maybe 1/2 3/4 inch) even larger with an iron core. With the magnet's tangentially you needed maybe .5 cm iron core, less for air core. This finding also extends to a regular pulse motor/SSG setup, i.e it runs 20% better with magnets tangentially, at least in my set-up, and I did not track power of the spike. Also I was in error about the rectifying the pulse slowing down an air core set-up, or at least as a generalization. I was running the pulse to a 1.5 volt battery which was similar to shorting it to the other lead, when I ran an air core to a 6 volt battery I again saw improvement. In my set-up with the iron core ZFM I was seeing improvements in efficiency with multiple cores, I think this is a way forward, but I just ended up looking at so many different set-ups with different results that I sort of burnt out on this for the time being. I think that is a way forward, especially as we see the conference machine with windings spread around the rotor.
A little theory, there are three ways I can think of (maybe there are more) to run a rotor off a coil. First is, as in SSG, point it at the rotor and run off the B field, second sideways as in the ZFM and run it (though it shouldn't) on lines of force, third you could turn the ZFM coil up/down instead of sideways. In this case the rotor would want to turn through the table you have it on. That wouldn't work, unless you let the rotor turn that way and why not just wrap the coil right around the rotor, or, a Neuman Motor/Bedini Window motor. The ZFM and window motor run off the same lines of force. To improve any of these we need more induction. As Neuman pointed out very clearly induction is not linearly related to input power. To put it quite plainly induction is in large part a function of mass of the coil (again read Neumann's book) there are other factors of course, resistance of conductor, shape of coil and certainly core material if a core is present, however coil mass is quite important and generally the overriding variable in an air core.
From there we may go back to that great experimenter and scientist Michael Faraday. The power of the displacement current will be a function of the magnitude of the inductive change and the rate at which it occurs. This is not the 1000 year old Chinese science of rockets nor is it trephaning, it is Faraday. The question of what factors affect the rate of change of induction in a coil is one worth considering.
Apologize I had trouble improving my last version of the John Bedini's ZFM, perhaps in the New Year.
I really enjoyed your updated presentation of one form of the ZFM with the AND logic gate. Very nicely done and well executed. You certainly have the touch in presenting an elegant form for this motor.
Talk about throwing down the gauntlet, But seriously, that's a nice Christmas present, I won't ask for a diagram (though I won' refuse it either) but you maybe can mention if I am wrong on the concept here. You are taking the spike aka "spiky" sending it to a small cap and second coil in parallel and taking the spike off the collapsing second coil and sending it to the run battery?? I don't know, whatever it is it sounds pretty sneaky to me. BTW I like that "And Gate" name very catchy. Happy Holidays to you and yours. -Paul
Yea, I liked it much better. Makes more sense considering Tesla invented the AND logic gate - Thanks! :-)
Not much of a schematic, pretty much exactly as I describe in vid.Here is where I posted it a while back though, I posted a vid in that thread you can also find it on my youtube.
The pairs of transistors I used in the circuit are able to handle up to 200 watts at 30 Amps pulsed. These are only available from the United Kingdom.
I paid and extra $20.00 shipping fee to get them because they handle 50 more watts then the ones John Bedini used. The biggest issue here is keeping them
cool enough to keep running for a period of time. There have thermal pads under each transistor and they were glued down with thermal conductive glue to
an aluminum plate. Theses transistors are normally used in Audio amplifiers and can drive low resistance 4 ohm speakers. Unlike the SSG coil which is a
litzed type coil which makes a capacitor for stored voltage which would have a big kick back onto the transistors when the load resistance changes. This is why
the SSG has protection Neons to keep them from getting damage from the kick back spike. Each transistor pair is actually handling 90 watts of power at the
36 volt input power voltage. Since the transistors are only switched On for a short period of time these are only running at 50% of the specification listed in
the data sheet. If you were to build the same circuit using 2N3055 transistors you need to pair up each 2N3055 (NPN) transistor with a MJ2955 (PNP) transistor.
Each of these transistors would have to be the TO-3 or now TO-204AA package. But this paired combination will only handle 115 watts so I would not run these
at the 36 volt input voltage. You would also need to heat sink them good just to reach the 115 watt capability listed on the data sheet. Without a heatsink you
would be lucky to reach half the specification of wattage capability without burning them up. There are two limitations on the power handling ability of a transistor
Average junction temperature and Second breakdown voltage. Safe operating area curves indicate IC − VCE limits of the transistor that must be observed for reliable operation; i.e., the transistor must not be subjected to greater dissipation than the curves indicated on the data sheet.
-- James
James,
Many thanks for the detailed explanation. My take home from this is that 1) I wasn't entirely off base that 3055s or Tip 31s would potentially have difficulty in this situation where the spike is unrectified to load in the circuit and 2) As these are higher power transistors at least there isn't yet another anomaly to worry about with the ZPM, we're seeing a lot already starting with the fact that I 'm not sure the textbooks say you can run something off the lines of force.


Leave a comment: